この記事は2024年のWMMC Advent Calendarの9日目の記事です。

昨日の記事はぱわぷろさんの「学生よ、GitHub Copilot と共に生きよ」でした。AIと共に生きなければ淘汰されていく時代に突入しているので、他の人のAIとの付き合い方はたくさん参考にしたいところです。私も「新しいものは取り込み、まずは遊んでみるのは大事」と非常に思います。
こんにちは。二回目の登場です。田中です。モータマウントとホイールの設計をしたので新機体を紹介していこうと思います。
まず、今回の改造はNHKの魔改造の夜のように素材そのものを生かしたいと思っているため、見た目はNucleoマウスを維持した状態の改造となっています。そして今回、魔改造Nucleoマウスのために犠牲になっていただくマウスはこちら。
研究室に転がっていたマウスです。先輩が置いていったマウスですが、置いていったということはいじっても良いですよね…。大事にされていると怖いのでこのあと確認します。
電装周り
前回は昇圧モジュールを検討しますと締めていた気がしますが、昇圧はしないことにしました。というのも、必要な平均電流が2,3Aになってくると30Vに昇圧してもほぼ100W級になってしまい大型かつ高価なものになってしまいます。昇圧は現実的ではないですね。昇圧できない分はLiPoに頑張っていただきます。LiPoは4Sのままのつもりですが、電圧不足であれば5S、6Sを検討します。
機体についているDCDCは入力電圧が最大32Vまで対応しているため、4Sバッテリを入力しても問題なさそうです。NucleoマウスのDCDCはこちらです→https://akizukidenshi.com/catalog/g/g107179/
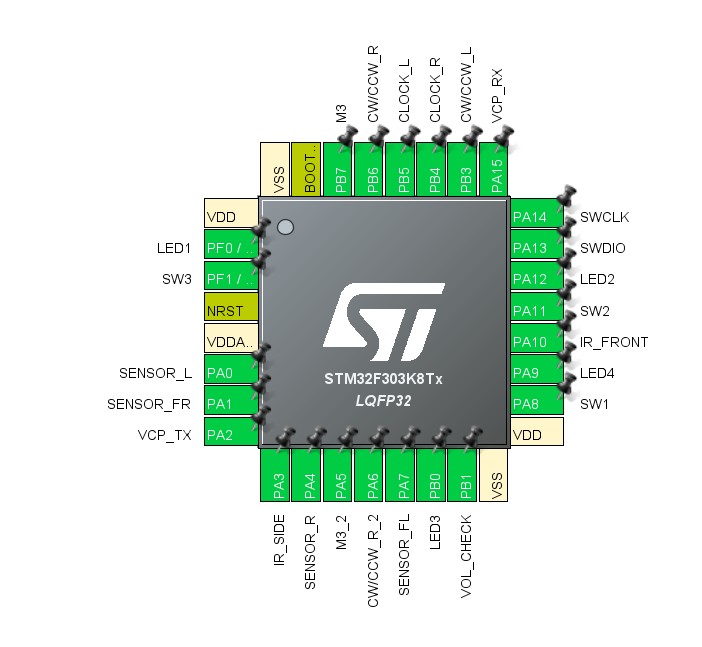
続いてSTMのピン割り当てです。以下の画像はNucleoマウスのピン割り当てです。ステッピングモータ用に多くのピンを割いているため、F3マイコンのすべてのピンを使用しています。
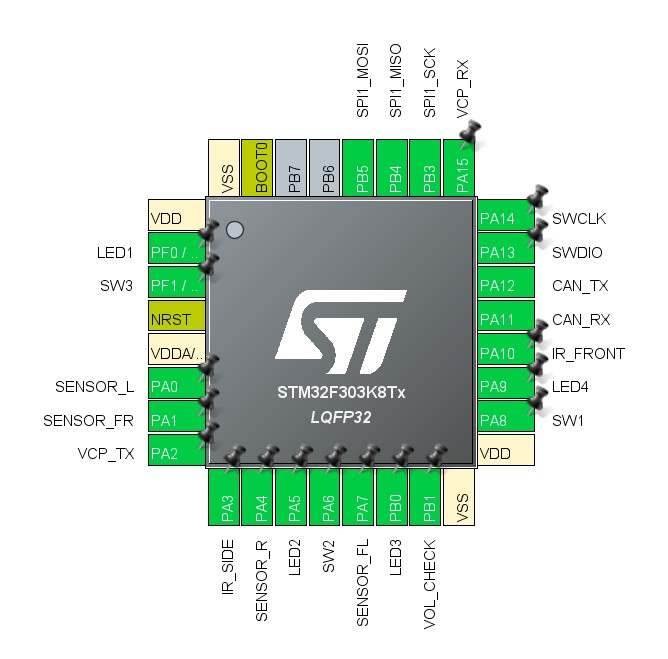
今回使用するQDDモータはCANの通信ができれば制御可能なため、以下のような割り当てになります。CANの通信用にLED2とSW2ピンが邪魔だったため、それぞれピンの位置を変更しています。制作の際はパターンカットで対応します。SPI線はIMUの搭載用に取っておきます(今回は乗せるつもり無いけど一応ね)
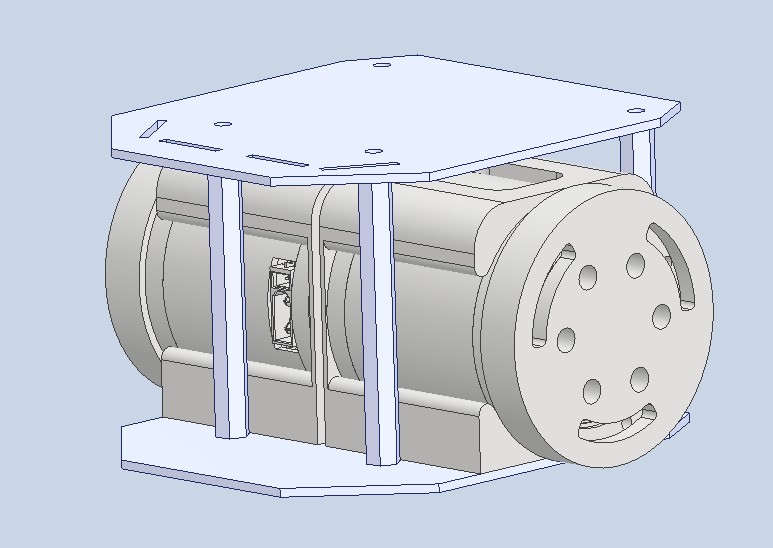
機体設計
正直、モータマウントを作るだけなので大したことはしてないです。適当アセンブリは以下のとおりです(時間なかったので本当に適当…)ABSのGFかPETGのCFあたりで印刷するつもりです。
さいごに
研の中間発表が重なっていたので時間が厳しいことは重々承知していたものの、やっぱりマウスに時間は割けなかったですね…。投稿遅れてしまって申し訳ございませんでした。日付変わる前には投稿できたので許して…。
次回は遊殻編です。遊郭をもじるのはきつかった…。殻は機体の外装とかのイメージで漢字を変えてみました。4脚ロボとかだったら確実に遊脚ってしてましたね。この縛りこのあときつそう…。次回は機体を組み立てて動作試験します。
明日の記事はよつさんの「コンパイラとか環境構築について」です。お楽しみに~。

コメント